


新聞中心
NEWS CENTER
怎樣才叫真正理解PID?
所屬分類: 技術(shù)課堂
2024-09-09
任何一個東西,我們需要去真正理解和應(yīng)用到,其實都是從最根本的地方出發(fā),一般就是最基本的定義和概念出發(fā),我們基本就能夠理解,熟悉及應(yīng)用。
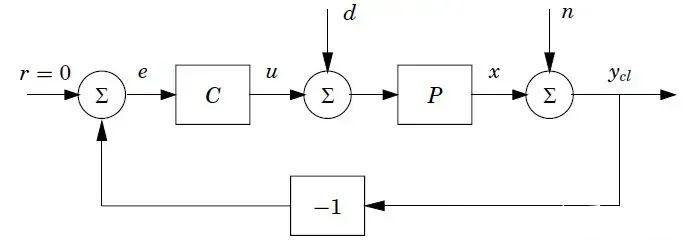
PID:比例-積分-微分控制器,熟悉和了解它我們需要結(jié)合整個控制框圖。
一般常規(guī)的系統(tǒng)控制框圖如下圖所示,其中C表示控制器,P表示被控對象,r表示期望數(shù)據(jù),d表示外界擾動,n表示外界噪聲。我們在這里則是將PID控制器來代替C。
-
PID控制器
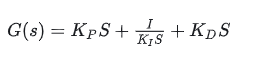
PID控制器形式主要有三種,并聯(lián),串聯(lián)以及理想。
并聯(lián)則是三個參數(shù)相互獨立,
并聯(lián)公式如下:
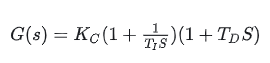
串聯(lián)公式如下:
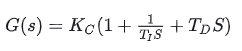
理想公式如下:
所以在處理控制器的PID控制算法之前,先確定好實現(xiàn)PID控制功能的形式,然后才是參數(shù)整定。
-
參數(shù)含義
選定PID控制器形式之后,我們需要明白PID三個參數(shù)分別表示什么含義,以及各個參數(shù)所起到的作用,對系統(tǒng)的影響。
P:比例參數(shù),代表Present(現(xiàn)在),對誤差進(jìn)行比例放大,減小上升時間,減小系統(tǒng)誤差,但會增加超調(diào);
I:積分參數(shù),代表Past(過去),對過去的誤差值進(jìn)行累積,能夠消除超調(diào)和誤差,但是會增加調(diào)節(jié)時間。
D:微分參數(shù),代表Future(將來),對誤差的變化趨勢進(jìn)行判斷,能夠減小超調(diào)量。

-
算法的工程應(yīng)用
如何將理論的算法應(yīng)用到實際工程應(yīng)用中呢,針對工程中出現(xiàn)的問題,如何對算法進(jìn)行調(diào)整,需要進(jìn)行一些簡單的總結(jié)。
PID控制算法的應(yīng)用主要考慮以下幾個點:
-
Noise Filtering and high frequency roll-off
濾波,主要是對微分項D增加濾波器,一般為低通濾波器。那為什么是微分項,我們簡單分析下,
假如輸入信號為:
其中噪聲信號為正弦信號,頻率為wn,那么對信號進(jìn)行微分處理后,
當(dāng)wn比較大時,微分后的信號的幅值將會很大,則會產(chǎn)生較大的干擾,所以需要進(jìn)行濾波處理。
-
Set point weight and 2 DOF
-
Wind up
防風(fēng)策略,就是考慮到積分飽和,或控制器輸出飽和,需要對輸出進(jìn)行限幅操作,確保數(shù)據(jù)在合理的輸出范圍。
-
Tuning
參數(shù)整定,這個就需要不同的方法,主要有經(jīng)驗值法,Lambda整定方法,試湊法,零極點配置方法等。
-
Computuer implementation
程序代碼的完善,主要是對程序代碼進(jìn)行離散化處理,進(jìn)行編程操作。
以上就是一些簡單的總結(jié)和歸納,如有錯誤,請批評指教。
:點燃人才與服務(wù)的引擎,驅(qū)動公司飛速發(fā)展")

竭誠為廣大用戶提供優(yōu)質(zhì)的產(chǎn)品和及時、周到的服務(wù)
聯(lián)系方式
銷售熱線:0731-52265588
15308468229
17673181870
電子信箱:SCZN126@126.com
企業(yè)地址:湖南省湘潭市湘潭縣易俗河鎮(zhèn)天馬東路南側(cè)8號